
Как из дешевого китайского танчика (радиоуправляемая модель) сделать робоплатформу для проекта "Автономная навигация робота"
В начале, хочу вкратце обрисовать ситуацию. Значит, у Вас есть желание заняться экспериментами по автономной навигации робота (научить робота самостоятельно добираться из пункта "А" в пункт "Б", да и вообще, научить робота ориентироваться в собственной квартире), но нет желания тратить много времени на создание сложной (и дорогой) робоплатформы.
В таком случае, братья китайцы, уже всё сделали за нас, осталось только запастись небольшой суммой денег и купить необходимое оборудование. Нам понадобятся: ПК с быстрым процессором, TV тюнер, видео камера с радиопередатчиком и приемником видеосигнала, ну и наконец то, радиоуправляемая модель танка. Вот с этого места начнём поподробнее. Я попробую описать в деталях способ, позволяющий подключить пульт радиоуправления моделью к компьютеру на примере конкретной радиоуправляемой модели, хотя я полагаю, что этот способ можно распространить и на модели других типов.
1. Идём на рынок, ищем контейнер (палатку, магазин) где продают детские игрушки, покупаем радиоуправляемую модель танка (Модель: "Huan QI NO.516-10", цена: приблизительно 25$).
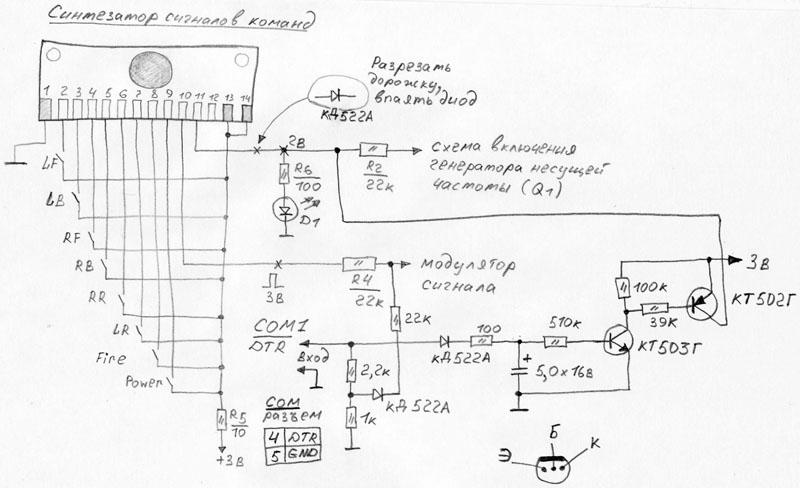
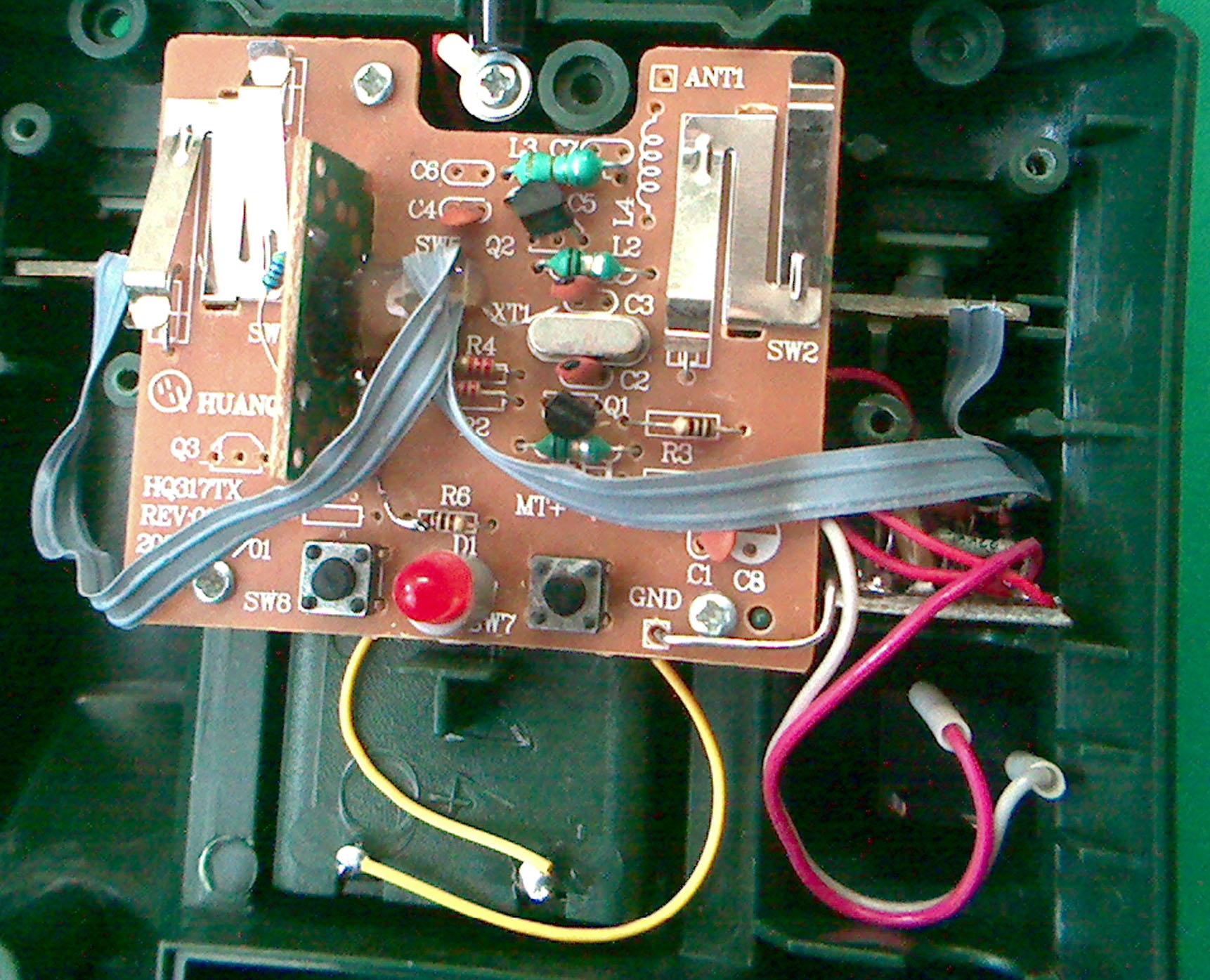
2. Приносим модель домой, и разбираем пульт радиоуправления. Внутри пульта видим небольшую плату с мизерным количеством радиоэлементов, среди которых можно выделить основные части схемы: микросхему "Синтезатор сигналов команд" и окварцованный генератор несущей частоты (собранный на двух транзисторах).
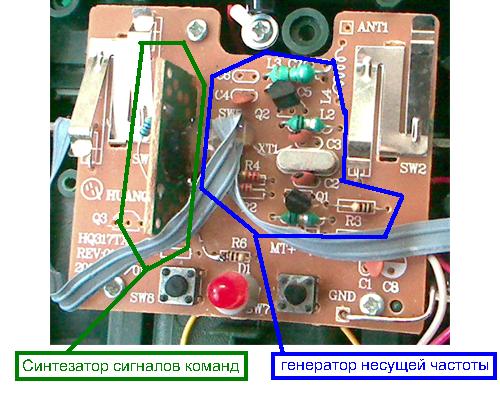
У микросхемы синтезатора есть восемь входных сигналов (от кнопок управления) и два выходных. Первый выходной сигнал запускает (включает) генератор несущей частоты (радиопередатчик), со второго выхода поступает закодированный (низкочастотный) сигнал команды.
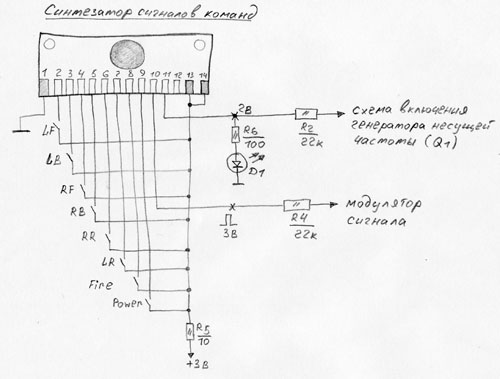
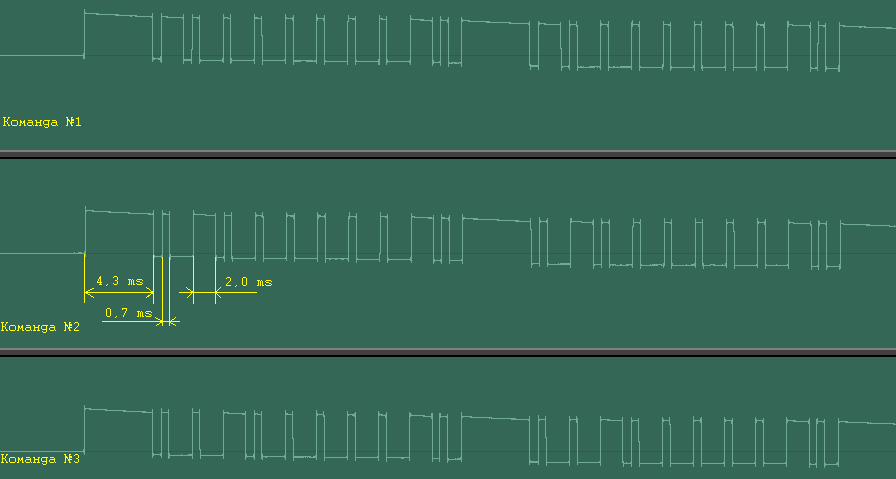
Для того, что бы компьютер мог управлять моделью, достаточно сымитировать сигнал синтезатора через COM порт (выходным сигналом "Data terminal ready") и пустить его на генератор несущей частоты в обход синтезатора. Синтезатор выдаёт команды, закодированные пачкой импульсов (пауза, потом десять импульсов и так в цикле). Каждой команде соответствует набор длинных и коротких импульсов, расположение которых и формируют непосредственно код команды.
3. Что бы обойти микросхему "Синтезатор сигналов команд" необходимо собрать дополнительную схему, которая будет включать передатчик, в случае появления сигнала от компьютера и преобразует уровни сигнала COM порта (ноль -10v, единица +10v) к амплитуде микросхемы-синтезатора (3v).
Когда монтаж дополнительной схемы будет закончен, должно получится приблизительно следующее:

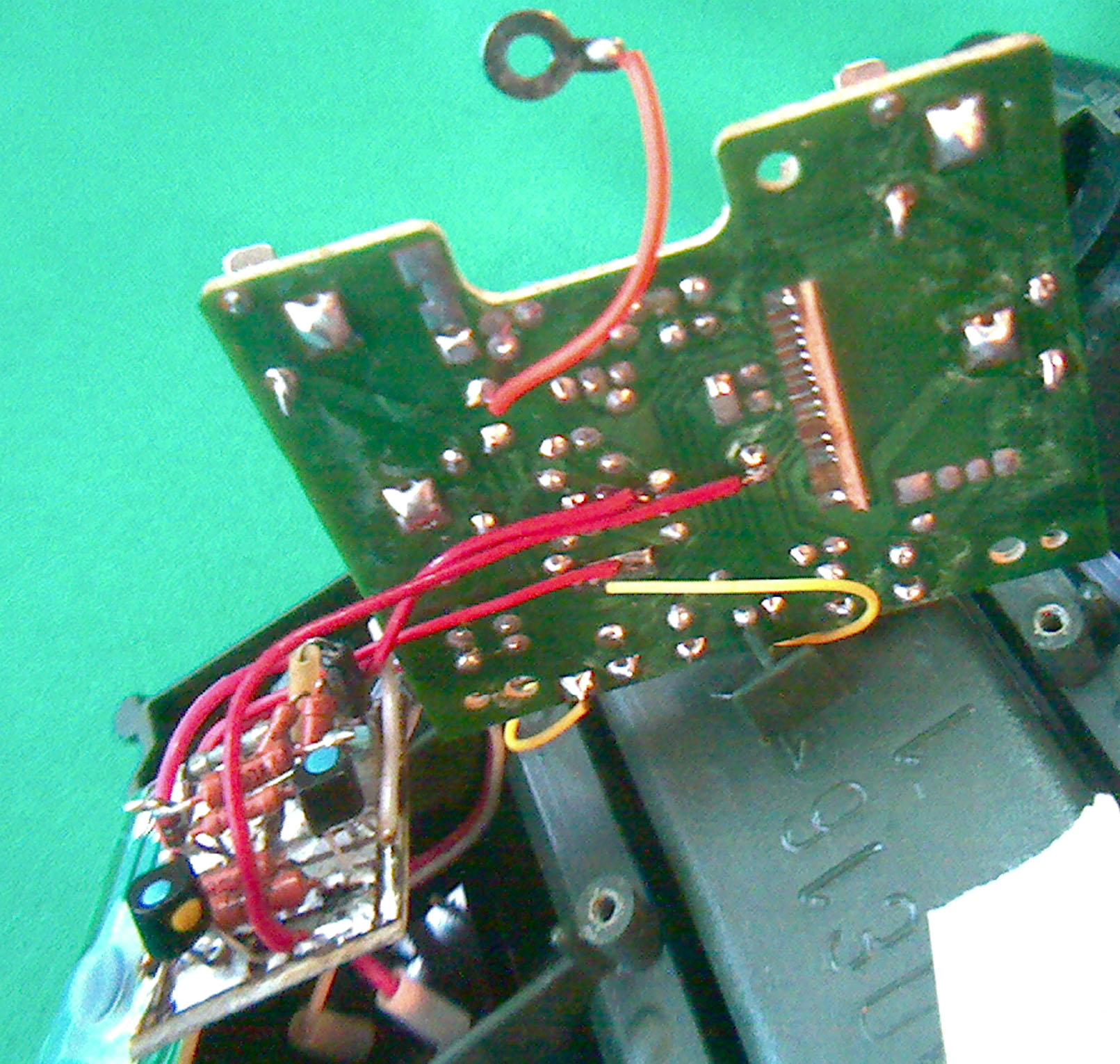
4. Размещаем дополнительную схему в одной из пустых секций корпуса пульта управления, и монтируем разъём под мини-джек (разъем, как на наушниках от плеера) для связи с COM портом компьютера.

5. Паяем шнур мини-джек <--> разъем COM порта:
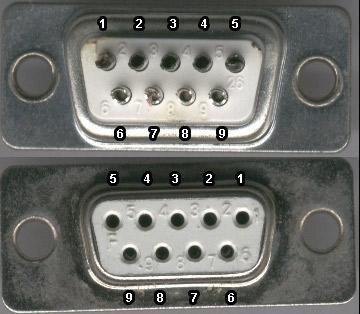
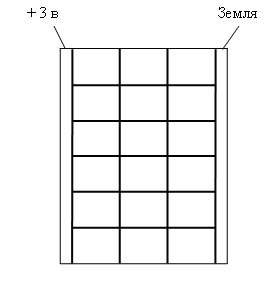
Внешний вид COM разъема
|
Распиновка COM порта
Ну вот, с аппаратной частью закончили. Теперь осталось скачать программу "Драйвер управления роботом", которая будет имитировать сигнал микросхемы синтезатора (через COM1), и таким образом управлять моделью. Программу драйвера, вместе с исходными текстами можно скачать здесь: RobotController.zip