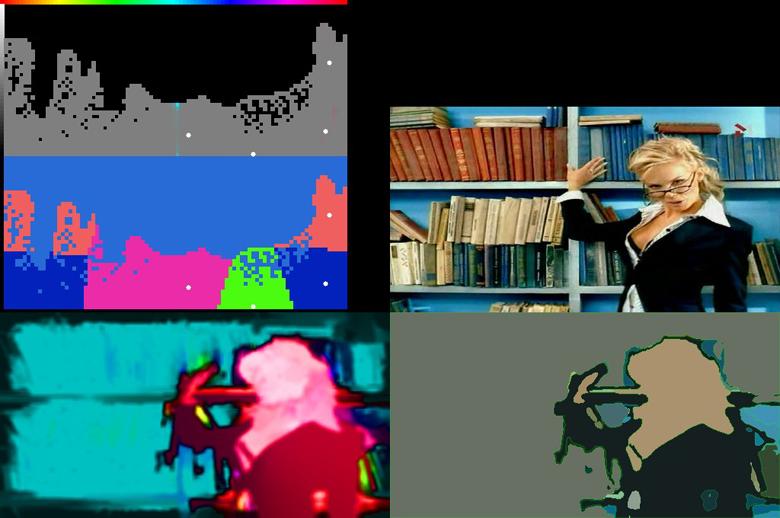
I propose effective enough method of "Optical flow" algorithm based on tracking contour points of segmented images.
Demo version OF_EDV_Demo.zip (2Mb)



Processing of two adjacent images (visualization: direction - speed --> colour - brightness):

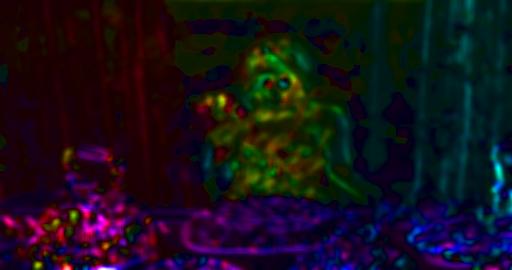
Input parameters: cvCalcOpticalFlowHS( Img1, Img2, 0, DxVMap, DyVMap, 0.002, cvTermCriteria(CV_TERMCRIT_ITER|CV_TERMCRIT_EPS,20,0.03));

Input parameters: cvCalcOpticalFlowLK( Img1, Img2, cvSize(11,11), DxVMap, DyVMap);


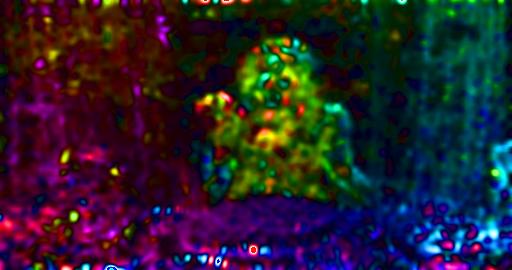
Processing of three adjacent images with the subsequent addition of the processed adjacent velocity maps and then Gaussian smoothing:


The propose method can be applied to the motion segmentation and detection of objects in a video sequence: